Schrittmotor Basics
Einleitung
Wer eine CNC Fräse aufbauen möchte oder einen RepRap Printer, der wird sich etwas mit Schrittmotoren
und deren Technik beschäftigen müssen. Diese Seite gibt einen groben überblick über die Grundbegriffe dabei.

Wirkprinzip

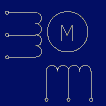
Dieses Bild, Quelle: de.wikipedia.org, zeigt es sehr schön, ein Schrittmotor besteht aus einem permanent-magnetischen
Rotor, umgeben von mehreren Motorwicklungen, die in einer bestimmten Sequenz eingeschaltet werden.
Der Motor läuft mit jedem Taktzyklus jeweils genau einen Schritt ("step") weiter, bewegt sich also je step
um einen definierten Winkel weiter. Integriert man diese Schritte auf (zählt die Schritte), so kennt man
auch die Position des Rotors. Aus diesem Grunde werden Schrittmotoren dort eingesetzt, wo man definierte
Bewegungen benötigt und die Stellung des Rotors genau kennen muss. Typischerweise CNC Maschinen, Drucker, etc.
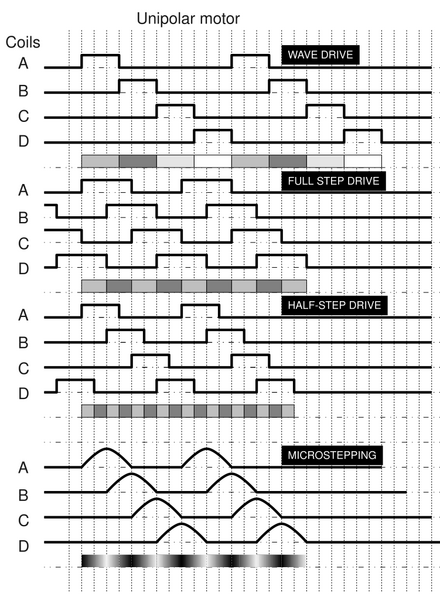
Es gibt mehrere Modi, in der die Motorwicklungen angesteuert werden können, diese Abbildung zeigt den
sogenannten wave drive mode, welcher in der Praxis selten benutzt wird.
Im wave drive mode wird jeweils immer nur eine Windung eingeschaltet, aus diesem Grunde erreicht der
Motor nie das im Datenblatt angegebene Drehmoment. Deswegen wird meist anstelle des wave drive mode der
full step mode verwendet, bei dem immer gleichzeitig zwei nebeneinander liegende Motorwickllungen
angesteuert werden. Mit zwei gleichzeitig eingeschalteten Windungen erreicht der Motor also sein Nenn-
drehmoment laut Datenblatt.
Ein Motor, der nur durch Ein- und Ausschalten der Windungen zwischen 'Aus' und 'Ein' angesteuert wird,
läuft sehr unruhig. Die Ursache liegt im Drehmoment: schaltet man die Motorwicklungen ein, steigt der Windungsstrom
entsprechend der Induktivität an und der Motor dreht sich einen Schritt weiter. Hat der Motor jedoch die nächste Schrittposition
erreicht, wird das Drehmoment des Motors zu Null. Der Motor bewegt sich entsprechend der bewegten Masse noch geringfügig weiter und
pendelt entprechend der mechanischen Dämpfung kurz um die nächste Schrittposition. Der Schrittmotor ist also prinzipiell ein
(unerwünscht) schwingungsfähiges Gebilde entsprechend der magnetischen Federkraft und der kinetischen Bewegungsenergie von Rotor und Last.
Daraus wiederum folgt, dass es Anregungsfrequenzen gibt, bei denen mechanische Resonanzen auftreten. Diese Resonanzfrequenzen hängen auch von der Masse der Last ab.
Vermindern lassen sich unerwünschte Schwingungen durch das sogenannte micro stepping, bei dem während
der Rotation der Motorstrom Zwischenwerte entsprechend einem sinusförmigem Verlauf des Motorstromes annimmt. Dadurch
werden Resonanzen deutlich schwächer angeregt. Die Positionsgenauigkeit des Motors wird durch diese Art der Ansteuerung
nicht zwangsweise verbessert, obwohl sich durch diese Art der Ansteuerung weitere Zwischenschritte ergeben.

Aus diesem Bild ist auch schon zu erkennen, dass die Motorwicklungen so verschaltet sind, dass man nur zwei
Motorwicklungen ansteuert, hier 'A' und 'B'.
Es gibt allerdings auch Schrittmotoren, die mehr als nur zwei Windungen besitzen, z.B. drei.
Elektrisches Ersatzschaltbild des Schrittmotors
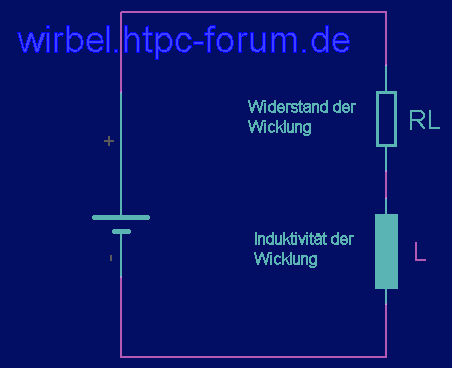
Das elektrische Ersatzschaltbild des Schrittmotors ist im einfachsten Falle
je Wicklung ein RL-Kreis, bestehend aus dem Windungswiderstand und der Windungsinduktivität.
Die Spannungsquelle symbolisiert die Versorgungsspannung der Schrittmotor-Endstufe.
Mit ein wenig Erinnerung an Differentialgleichungen, ja ja - das ist eine Anwendung davon ;-),
ergibt sich folgende Gleichung für den Strom. Und der Strom bestimmt das Drehmoment unseres
Motors!

Die folgende Abbildung zeigt den Stromverlauf, der sich beim Einschalten der Motorwicklung ergibt.
Angenommen sind 1000rpm, L = 14mH, R.L=4ohm.
Diese Werte entstammen dem Datenblatt eines Motors unter Annahme der Ansteuerung im bipolar-serial Mode (siehe unten).
250rpm und 200 Schritte pro Umdrehung bedeuten, dass die Einschaltdauer t.on je Wicklung maximal t.on = 1 / ((200*250)*1/min) = 1.2ms
beträgt. Dementsprechend ist die Skalierung der Zeitachse gewählt.

Wie man gut erkennen kann, erreicht der Windungsstrom bei 6Volt nach 1,2msec noch nicht einmal 0,5A - wobei der Stromsollwert
im Beispiel 3A beträgt. Selbst bei 48V wird er Sollwert des Stromes frühestens nach 1msec erreicht - der mittlere Windungsstrom liegt
dennoch weiter unter den angestrebten 3A. Der gleiche Motor bietet in bipolar-parallel Anschlussvariante L=3,5mH, R.L=1ohm. Mit
dieser Anschlussvariante ergibt sich folgendes Bild:

Bei Parallelschaltung der Windungen bleibt die Zeitkonstante tau = L/R konstant, aber der maximal erreichbare Strom U_bat/R_L erhöht
sich auf das Vierfache - und damit ebenso das Drehmoment bei hohen Drehzahlen. Die Parallelschaltung der Windungen bietet für einen Schrittmotor
also deutliche Vorteile.
Anschluss Belegungen
Schrittmotoren gibt es in drei Anschlussausführungen, die sich durch die Anzahl der Anschlussleitungen unterscheiden.
a) unipolar, sechs Anschlussdrähte ("6 leads")
In diesem Falle sind jeweils zwei Wicklungen bereits im Motor miteinander verbunden und dieser Knotenpunkt bzw.
die Mittelanzapfung ist herausgeführt. Auf diese Weise kann die Mittelanzapfung z.B. auf +Vmotor legen und
durch wechselseitiges Durchschalten der Enden nach Masse jede Wicklung mit nur je zwei Halbleiterschaltern betreiben.
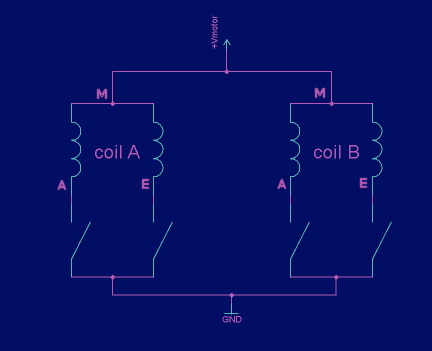
Nachteilig ist dabei, dass jeweils eine Windungshälfte ungenutzt bleibt und nicht zum Drehmoment beiträgt.
b) bipolar Serie oder bipolar parallel, vier Anschlussdrähte ("4 leads")

Bei vier Anschlussdrähten sind die Windungen bereits im Motor in Serie oder parallel geschaltet.
Zur Ansteuerung der Windungen sind jetzt H-Bridge Endstufen notwendig, der Name resultiert aus der H-förmigen
Konfiguration von je vier Schaltern (Transistoren), in deren Querzweig jeweils die Last (in unserem Falle die Wicklung) liegt.
Durch wechselseitiges Ansteuern der Schalter S1/S4 oder S2/S3 kann die Stromrichtung der Last bestimmt werden,
gleichzeitiges Ansteuern von S1/S2 oder S3/S4 schließt die Last kurz.

Dem Nachteil der doppelten Anzahl benötigter Schalter steht der Vorteil nun vollen Drehmomentes gegenüber,
der Unterschied unipolarer zu bipolarer Betriebsweise ist eine Kostenfrage. Technisch ist die bipolare Ansteuerung klar im Vorteil.
c) acht Anschlussdrähte ("8 leads")

Bei vier Anschlussdrähten sind alle Windungen aus dem Motor herausgeführt. Das bedeutet etwas mehr Verdrahtungsaufwand,
aber lässt alle drei Anschlussmöglichkeiten zu: unipolar, bipolar serie, bipolar parallel.
Bevorzugt werden jedoch die bipolaren Ansteuerungen zum Einsatz kommen.
Gängige Bauformen
Schrittmotoren werden meist in standardiserten Bauformen angeboten, bei denen der Anschlussflansch
und der Wellendurchmesser standardisiert sind.
Die gängigsten Größen sind
Für praktischen Bedarf kommen also hauptsächlich NEMA17 und NEMA23 in Frage, NEMA34 ist bereits zu groß.
Jede der Größen gibt es in unterschiedlichen Längen, Strömen, Drehmomenten und Anschlussschemata. Ein
recht bunter Zoo also.
Die wichtigsten Daten eines Schrittmotors